Notes for installation and operation
Ultrasonic sensors can be incorporated and operated in any position. However, positions which could lead to severe soiling of the sensor surfaces should be avoided. Drops of water and severe deposits on the surface of the transducer can impair the function. However, small dust deposits and splashes of paint do not affect the function.
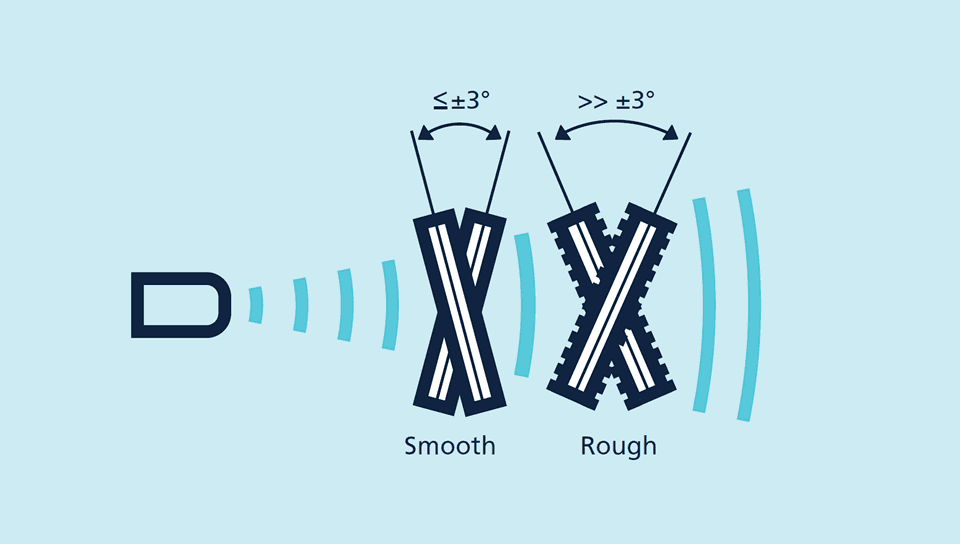
For scanning objects with flat and smooth surfaces, the sensors should be mounted at an angle of 90 ± 3° to the surface.
On the other hand, rough surfaces can cope with much larger angular deviations. In terms of ultrasonics, a surface is considered rough when its peak-to-valley height is in the order of magnitude of the wavelength of the ultrasonic frequency or is larger than this.
The sound is then reflected in a scattered fashion and this can lead to a shortening of the operating range. In the case of rough surfaces the maximum permissible angular deviation and the maximum possible detection range should be determined by way of trials.
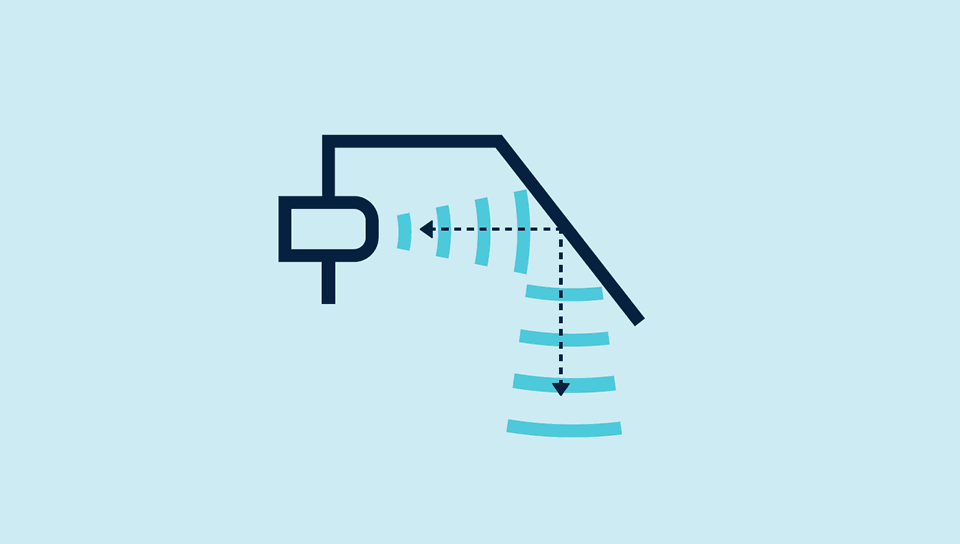
Sound-absorbent materials, e.g. cotton wool or soft foams, can reduce the operating range. On the other hand, liquids and solid materials are very good reflectors of sound.
Mounting spacing and synchronisation
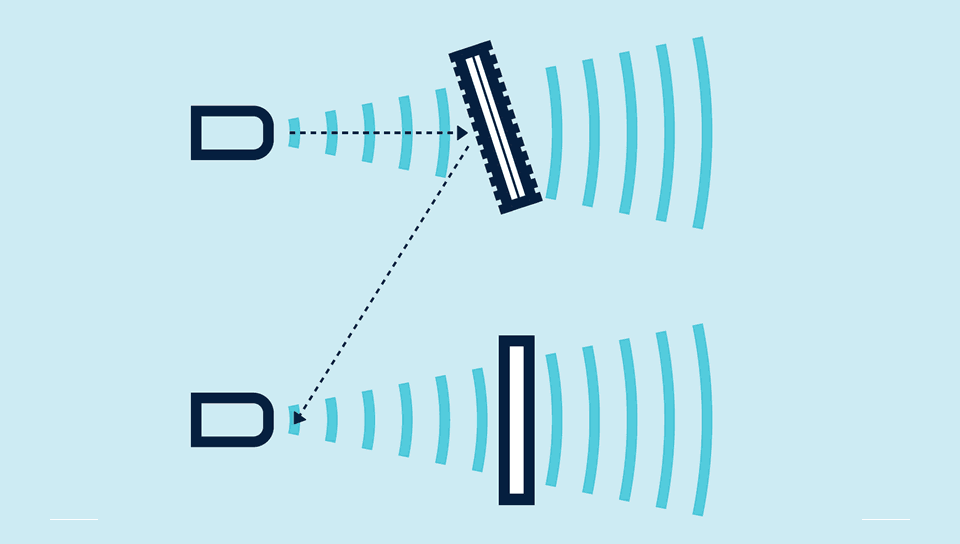
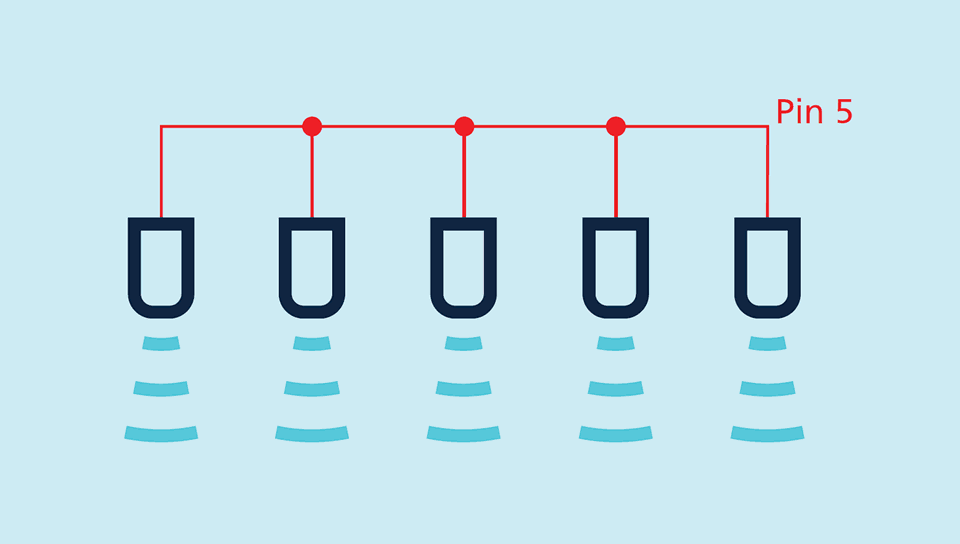
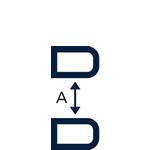
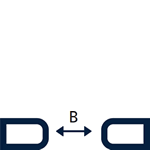
If two or more sensors are mounted too close to one another, they can influence one another. To avoid this, either the mounting spacing must be sufficiently large, or the sensors must be synchronised with one another. The following table lists the minimum mounting distances between unsynchronised sensors.
Minimum mounting distances between unsynchronised sensors
| Operating range |
 |
 |
|
 |
0.07 m | ≥ 0.25 m | ≥ 1.10 m |
 |
0.15 m | ≥ 0.25 m | ≥ 1.30 m |
 |
0.24 m | ≥ 0.25 m | ≥ 1.40 m |
 |
0.25 m | ≥ 0.35 m | ≥ 2.50 m |
 |
0.35 m | ≥ 0.40 m | ≥ 2.50 m |
 |
0.7 m | ≥ 0.70 m | ≥ 4.00 m |
 |
1.0 m | ≥ 0.70 m | ≥ 4.00 m |
 |
1.3 m | ≥ 1.10 m | ≥ 8.00 m |
 |
3.4 m | ≥ 2.00 m | ≥ 18.00 m |
 |
6.0 m | ≥ 4.00 m | ≥ 30.00 m |