

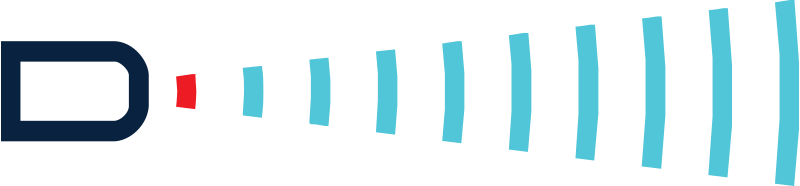
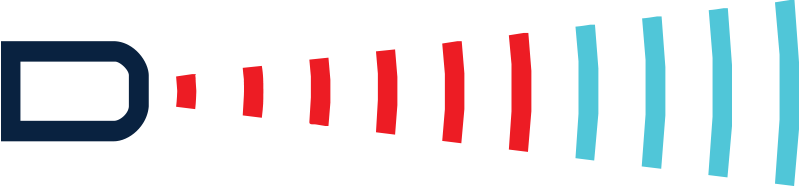
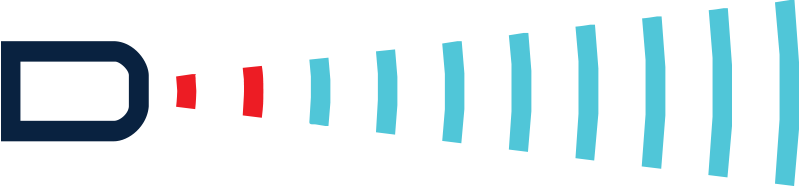
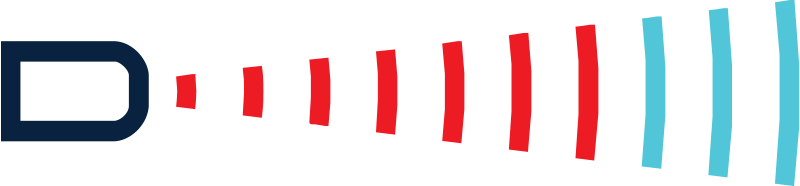
Les critères essentiels
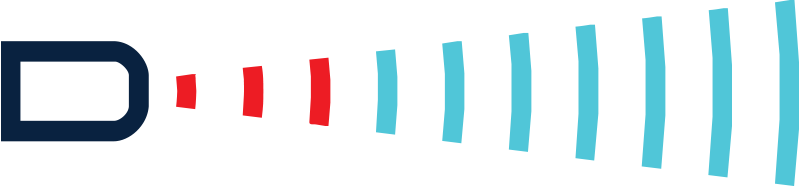
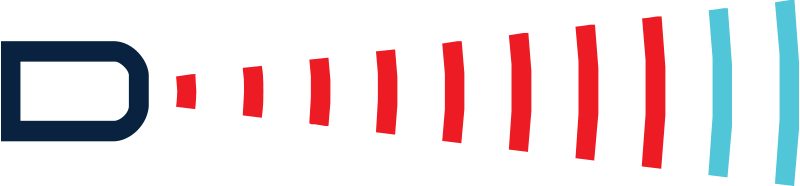
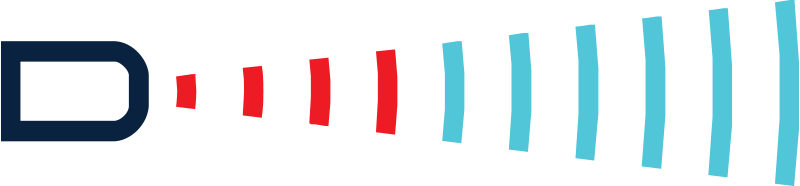
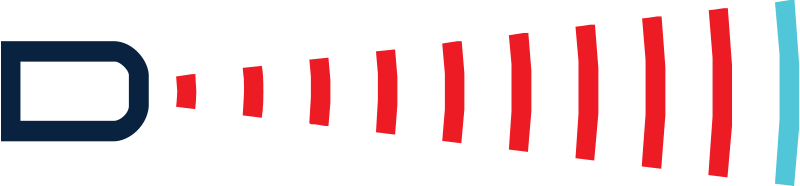
pour le choix d’un capteur à ultrasons sont sa portée et la zone de détection tridimensionnelle qui lui est associée. Pour déterminer celle-ci, différentes cibles types sont introduites latéralement dans le champ de détection. Chaque point de commutation permet de déterminer la forme du lobe de détection.
Les zones rouges
sont mesurées et à l’aide d’une barre cylindrique (ø 10 ou 27 mm selon le type de capteur) et indiquent la zone de travail typique d’un capteur.
Pour obtenir les zones bleues,
une plaque (500 x 500 mm) est guidée de l’extérieur vers le champ acoustique. L’angle optimal de la plaque par rapport au capteur est systématiquement choisi. La zone de détection maximale du capteur est ainsi définie. La détection n’est plus possible en dehors des lobes acoustiques bleus.
Un réflecteur avec de plus mauvaises caractéristiques de réflexion que la barre cylindrique est reconnu par les capteurs dans une zone qui est inférieure à la zone de travail rouge. En revanche, un réflecteur avec de meilleures caractéristiques aura une zone de détection dont la taille se situe entre la zone de détection rouge et la zone de détection bleue.
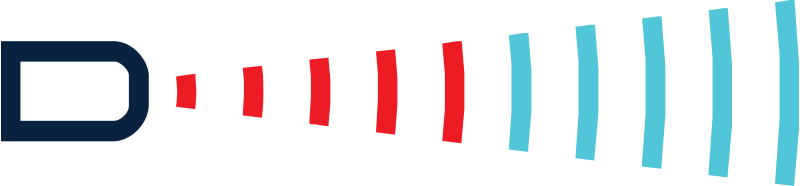
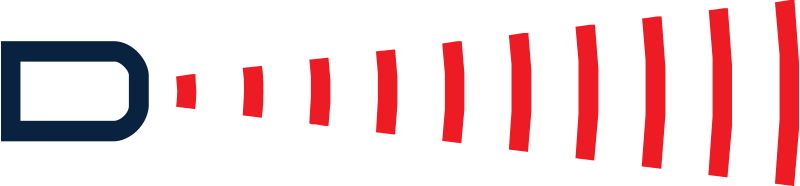

 Tube de 10 mm Ø ou 27 mm Ø
Tube de 10 mm Ø ou 27 mm Ø Portée de service
Portée de service Plaque de 500 x 500 mm
Plaque de 500 x 500 mm 






